 2024/10/22 10:24
2024/10/22 10:24
2024/10/22 10:24
2024/10/22 10:24
在元宇宙中,虚拟世界正与现实环境并行。虚拟场景如篮球比赛需要从现实世界中获取视觉、听觉和触觉数据来渲染。当前技术通过计算机视觉(CV)和计算机听觉(CA)实现视觉和听觉的虚拟再现,但触觉渲染仍面临挑战。这要求通过计算可穿戴设备,如VR眼镜和触觉手套,提供真实的触觉体验,如握持和传球,同时再现虚拟篮球的形状、纹理和表面粗糙度等物理属性。

计算机触觉(CH)关注于元宇宙中的触觉和渲染集成。目前缺乏通用的触觉数据捕获设备,类似于相机在计算机视觉(CV)中的作用。研究人员提出了一种触觉扫描仪和神经形态工程系统,通过模仿人类神经系统的电生理过程,实现了闭环触觉采集和渲染。该扫描仪使用压电换能器模拟神经元,并通过基于薄膜晶体管(TFT)的电路模拟突触行为和神经功能。这种装置能捕捉表面纹理信息,并用于在虚拟环境中重现真实的触觉体验。
仿生神经形态触觉系统架构
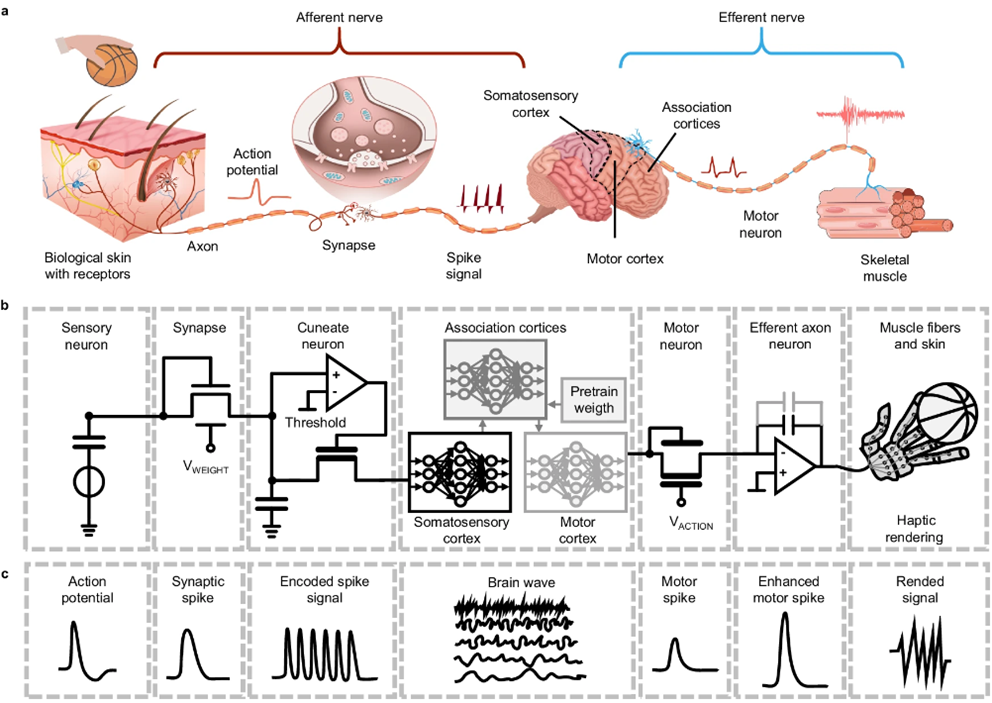
为了了解人类皮肤的神经机制,图1a展示了一个简化的神经系统,描述了如何通过握住篮球等机械刺激产生触觉信号。慢适应(SA)感受器如默克尔盘(SAI)和鲁菲尼末梢(SAII)负责检测静态力量,而快速适应(FA)感受器如迈斯纳小体(FAI)和帕西尼小体(FAII)则对动态力量更为敏感。当感觉神经元接收机械刺激时,会产生脉冲状动作电位(AP),通过突触和树突传递到脊髓,然后由楔状核的中间神经元传输到丘脑和体感皮层,最终被解码为感觉知觉并由联合皮层做出动作决策。运动皮层计划运动,产生脑电波,并通过类运动神经元传递运动脉冲到骨骼肌,完成“抓”篮球的动作。
基于这种生物触觉信号处理机制,研究人员设计了一种人工神经形态触觉系统,如图1b和1c所示。这种系统可以被视为触觉应用专用的“计算机”,相较于传统计算系统,它能以更低的计算成本和功耗完成相似的任务。为实现类似皮肤的神经形态处理单元(NPU),人们考虑使用薄膜晶体管(TFT)技术,因为其具有大面积和大规模生产的优势,得益于显示器行业和消费电子产品的应用。
仿生触觉扫描仪
从生物学角度看,皮肤通过初级传入系统的轴突连接感觉受体(如默克尔细胞),接收并处理机械刺激(图2a)。信号通过突触传递给下一个神经元,释放神经递质。图2b描述了机械激活的Piezo1/Piezo2通道的机械门控模型,显示了其在力和加速度响应中的作用。电气模拟方面,HHM模型复杂但生物反映性强,Izhikevich模型计算简便,LIF模型则易于实现且适合神经假体应用。基于这些模型,我们设计了一个触觉扫描仪,简化为感知、处理、接收三个阶段,并构建了一个神经形态处理单元(NPU),包括压电换能器、突触TFT和基于TFT的1T1C电路。
为了设计轴突神经元换能器,研究人员选择了聚偏氟乙烯(PVDF)由于其压电特性和灵活性。压电换能器由电压源(VPVDF)和电容器(CPVDF)串联组成,将机械刺激转换为电势。突触神经元采用双栅极TFT,其中顶栅极(TG)调节突触权重,底栅极(BG)与漏极短接以模拟突触电行为。等效通道电阻(rsyn)代表突触电阻,等效栅极绝缘体电容(csyn)视为细胞膜的寄生电容。TFT的TG调节阈值电压以模拟突触的兴奋性或抑制性。树突神经元由存储电容器(CS)构成,通过单栅极TFT(TFTN2)和触发栅极电压(VF)生成树突尖峰(ISPIKE)。为克服视觉和听觉的局限性,设计了一个触觉扫描仪,包含10×10的压电换能器阵列和10×10的NPU阵列,两者通过柔性印刷电路板(FPC)连接。图2f展示了集成有TFTN1、TFTN2和CS的NPU显微照片。
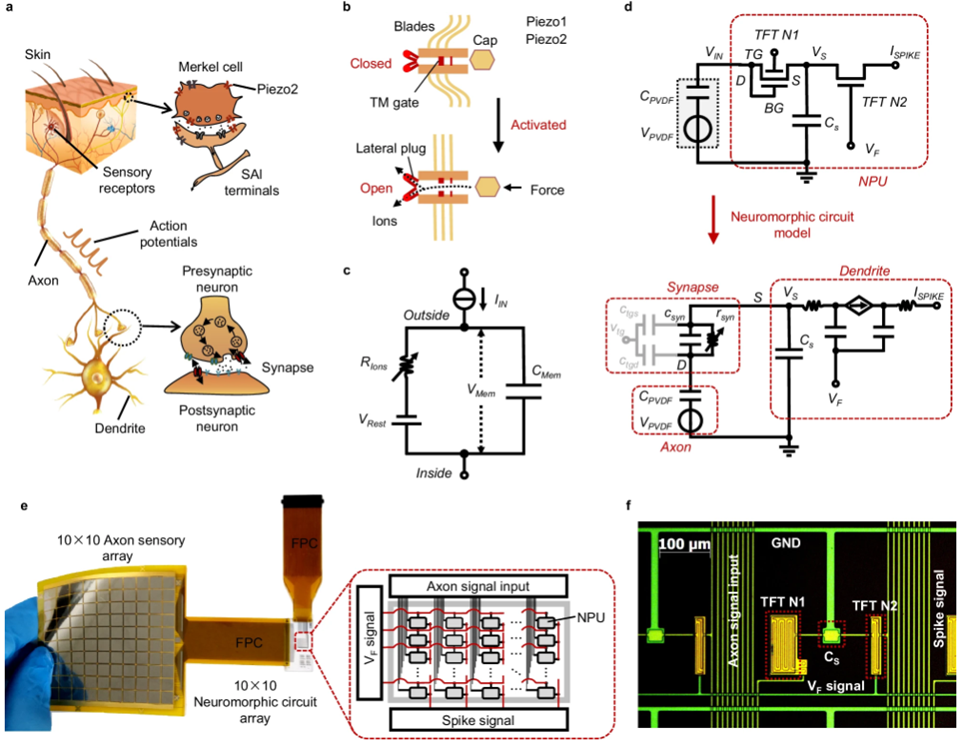
图2 触觉扫描仪的设计和部署。a突触前、突触后神经元和突触的示意图。b机械门控模型展示Piezo1/Piezo2通道由压缩力激活。c神经元的泄漏积分和激发(LIF)电路模型。d触觉扫描仪中传感器单元的神经形态模型图示。e基于压电传感器的10×10轴突传感阵列原型和由触觉扫描仪的NPU形成的神经形态电路阵列。轴突感觉阵列具有灵活性和适应性,以适应物体的表面。f基于2T1C神经形态电路制造的NPU的显微图像。
突触TFT作为人工突触
突触在神经信号传递中很重要,决定了触觉信息是否继续传递。生物突触通过释放神经递质传递信号,而人工突触TFTN1使用双栅极TFT模拟这一过程,正脉冲增强电流,负脉冲减少电流。TFTN1自主运行,功耗低。测量其对压电换能器的响应表明,其电导随刺激增加而呈指数变化,符合一阶非线性系统模型。IEPSC代表刺激诱导的稳态电流,频率高时突触电容降低,电导增加,尖峰电流增大,饱和时间缩短。动态刺激下,IEPSC在不同触觉压力下变化显著,更高的压力和更长的刺激时间会增大IEPSC。这表明,TFTN1和PVDF换能器在触觉扫描仪中有效响应外部力刺激。
触觉扫描仪中的NPU
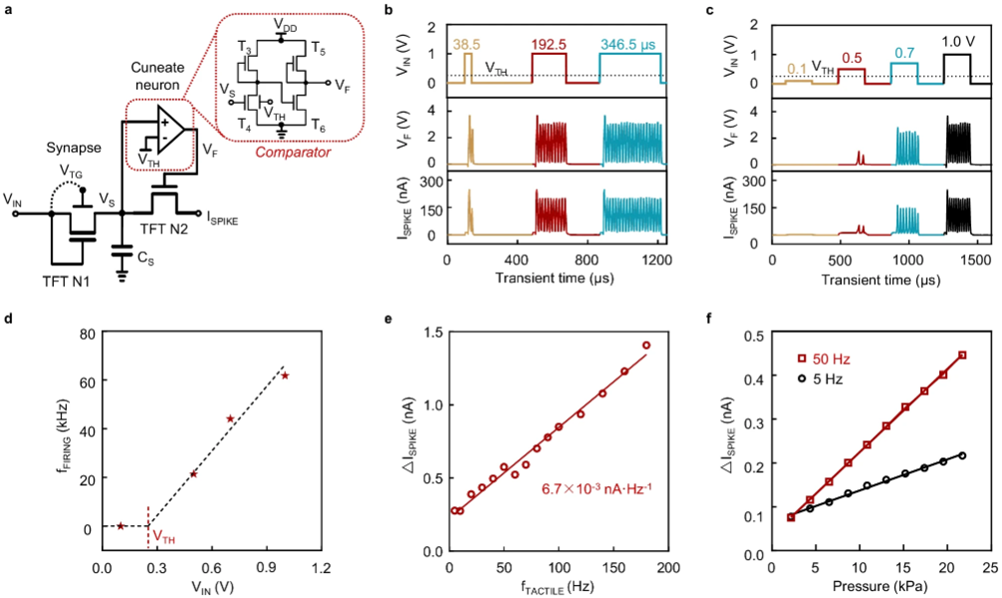
在触觉智能的研究中,触觉扫描仪中的神经形态电路需要模拟神经元的积分(图3a)和发射过程。我们设计的系统中,触觉信号首先在电容器中进行积分,模拟神经元的积分过程,然后通过比较器触发发射尖峰以模拟神经元的发射行为。实验中使用了不同波形和持续时间的模拟信号,结果显示,较长的刺激持续时间会导致更多的尖峰发射,而较高的刺激幅度则缩短了激发时间并提高了尖峰频率(图3b、图3c)。这表明,触觉刺激的强度和持续时间对尖峰的产生有显著影响(图3d)。通过设置阈值电压,可以调整系统的响应,使其符合生物神经元的行为。施加高强度或高频触觉刺激会使CS中积累更多电荷,从而增加ISPIKE的幅度,这类似于生物神经元的压力/频率-电流响应(图3e、图3f)。该研究还表明,系统的功耗远低于传统电路,证明了在低功耗下实现有效的触觉感知和信号编码的可能性。
触觉扫描仪的应用:触觉渲染
触觉扫描仪能够捕捉物体的触觉信息并用于虚拟现实中的触觉渲染(TR)。以“篮球”为例,扫描仪首先捕捉篮球的纹理、形状和粗糙度。轴突状换能器阵列将机械刺激转换为电荷,NPU将其处理为神经形态的尖峰信息。预处理后的触觉信息被存储为虚拟篮球,必要时可恢复以在虚拟环境中实现TR(图4a)。信号处理方面,触觉系统首先对原始振动信息进行分类,然后将其编码为脉冲序列,输入体感皮层进行感知。扫描仪通过特征表面捕捉纹理和粗糙度的TA信号,并存储在分层数据集中(图4e)。选择了五种不同材料(棉、羊毛、针织、金属、木材),通过快速傅里叶变换(FFT)对TA信号进行频谱预处理,结果表明纹理特征频率簇有显著差异(图4b)。基于机器学习的纹理识别准确率达到93%,显著高于未预处理的光谱数据(图4c)。触觉扫描仪在神经处理单元(NPU)编码后生成脉冲序列(图4d),并传送至体感皮层。触觉刺激解码目前基于幅度解调,而非精确的脉冲时间测量。解码后的TA信号包含幅度和频率信息,并通过商用TDK执行器进行TR信号渲染。TR信号经基准测试显示与TA信号具有良好的相似性(图4e),且在五种材料的平均Spearman相关系数为0.68,表明TR信号为TA信号的有效复制(图4f)。心理物理实验中,超过75%的志愿者能感知TR信号中的粗糙度差异。此研究展示了闭环触觉反馈的有效性。
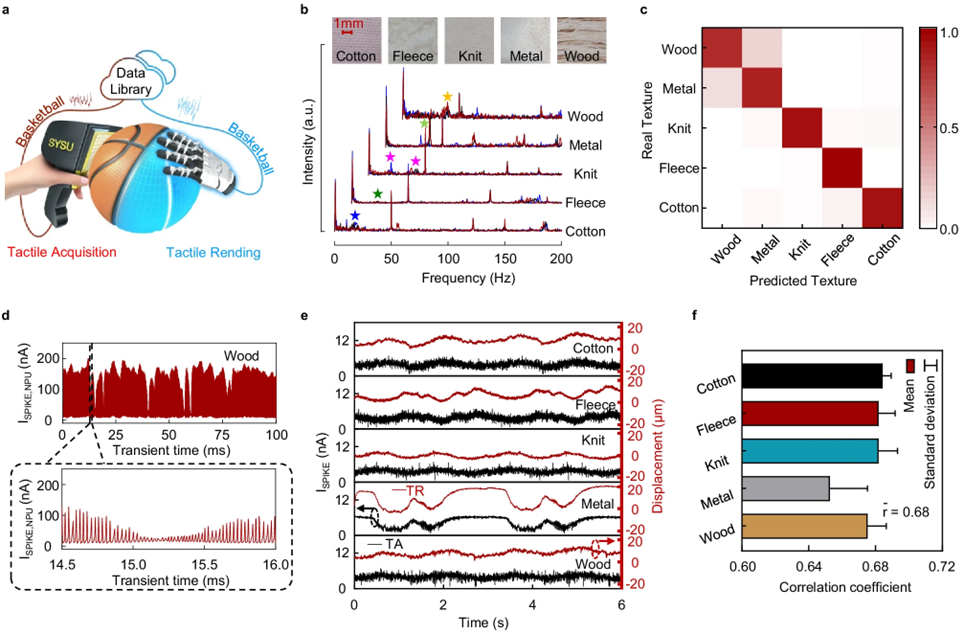
图4触觉扫描仪的应用a 示意图,说明触觉扫描仪在篮球元宇宙中的应用。b 不同质地(棉、羊毛、针织、金属和木材)的频域频谱。c 真实纹理和预测纹理之间的混淆矩阵。d NPU编码的木材TA信号(0-100毫秒)和14.5至16毫秒的详细ISPIKE。e 触觉采集(TA)和触觉渲染(TR)信号的比较。f频域中TA和TR信息集的Spearman相关系数,以展示TA和TR信号之间的相关水平。
讨论
受人类触觉系统启发,研究人员开发了一种具有10×10触觉传感阵列的触觉扫描仪。该扫描仪配备压电换能器和神经形态电路,能实时获取触觉刺激。压电换能器刺激感受器,神经形态电路模拟神经元传输机制。该系统成功捕获了五种不同纹理的触觉信息,识别和分类准确率超过85%。通过商用执行器,触觉刺激的再现效率达到68%。因此,该触觉扫描仪和神经形态系统有助于实现CH。
仅用于学术分享,若侵权请留言,即时删侵!
本文来自新知号自媒体,不代表商业新知观点和立场。 若有侵权嫌疑,请联系商业新知平台管理员。 联系方式:system@shangyexinzhi.com